Электронные компоненты
- Arduino-совместимая плата на базе микроконтроллера mega 2560
- 9 сервомоторов Dynamixel AX-12A
- Bluetooth модуль HC-05
- Seeed Studio Music shield v2.2
- светодиоды из адресной ленты WS2812.
- 4х баночный литий-ионный аккумулятор «КРАВТ»
- импульсный преобразователь на микросхеме LM2596
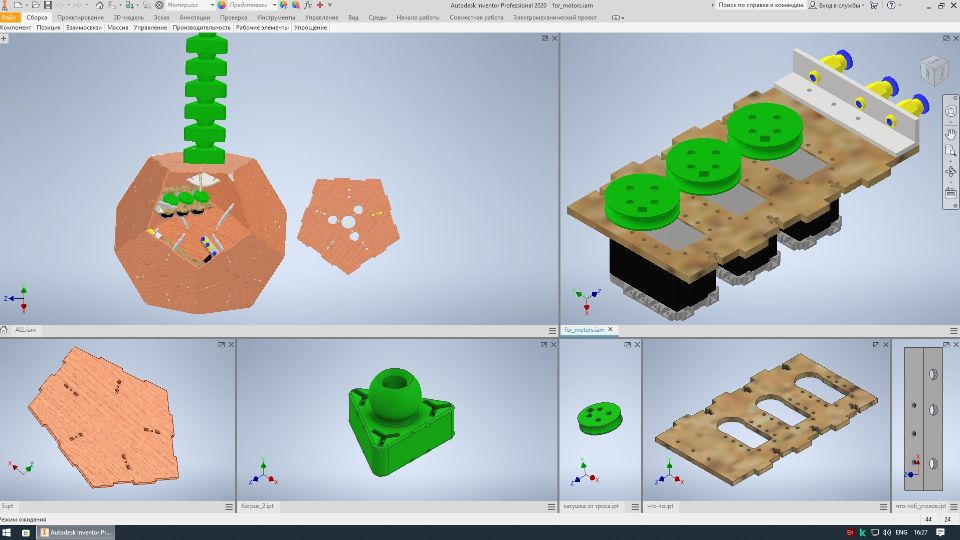
Конструкция робота змеи:
- В основании в форме додекаэдра из фанеры находится вся управляющая электроника робота
- Тело робота-змеи состоит из 13 пластиковых 3д печатных треугольных площадок с шаровой опорой, соединённых между собой тросами и трубкой. Первая площадка прикреплена к основе, а на последней закреплена голова, изготовленная из папье-маше
- Для реализации движений тросовой конструкции- были выбраны сервомоторы Dynamixel AX-12A, потому что они имеют защиту от перегрева и могут подключаться через одну шину данных.
- Змея находится внутри складного стола, изготовленного из фанеры и алюминиевых квадратных профилей.
Различное натяжение тросов, за счёт которого движется робот-змея, похоже на движение настоящей змеи, осуществляющееся за счёт сокращения мышц. В процессе движения тросы меняют свою длину, находясь в постоянном натяжении, и благодаря этому змея устойчиво фиксирует своё положение. Само же сокращение тросов происходит путём наматывания тросов на катушки, закреплённые на сервомоторах.
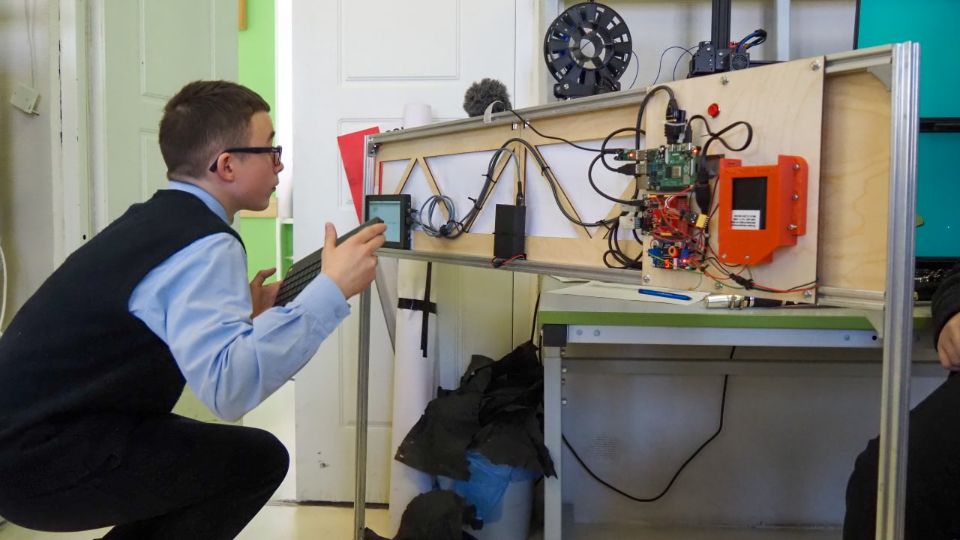
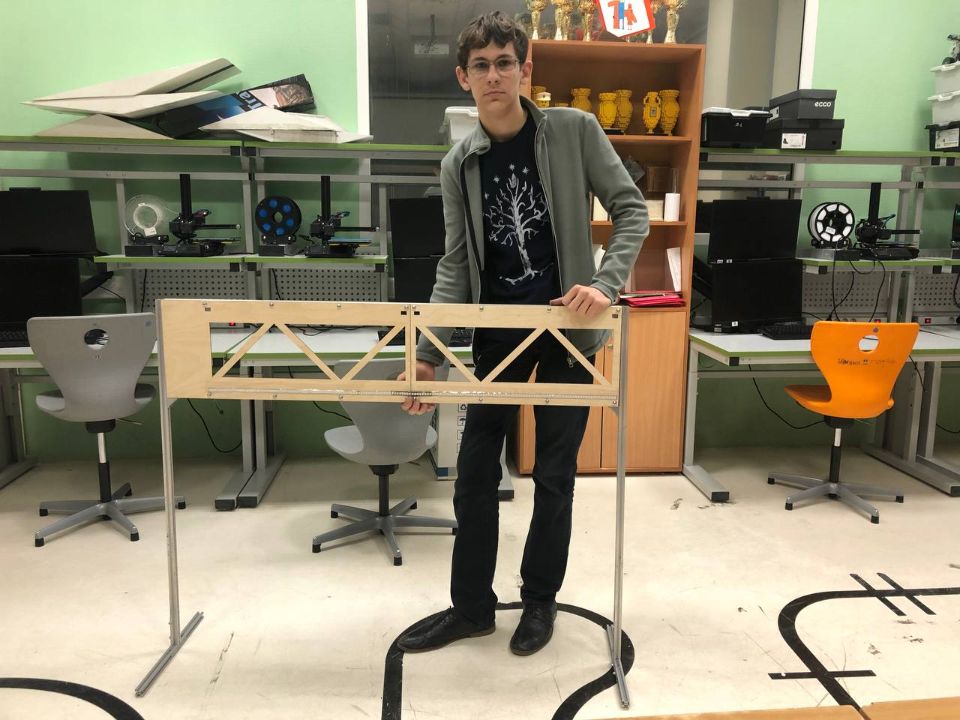
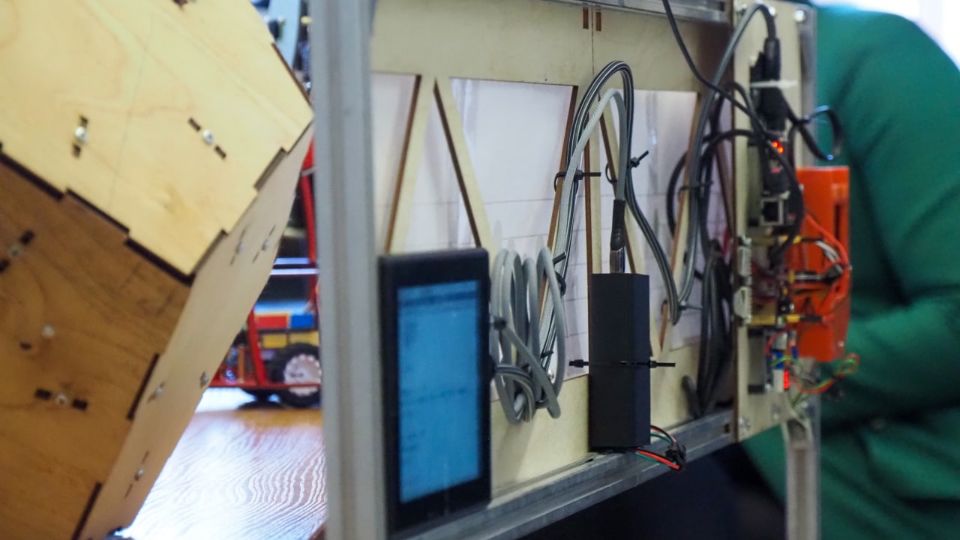
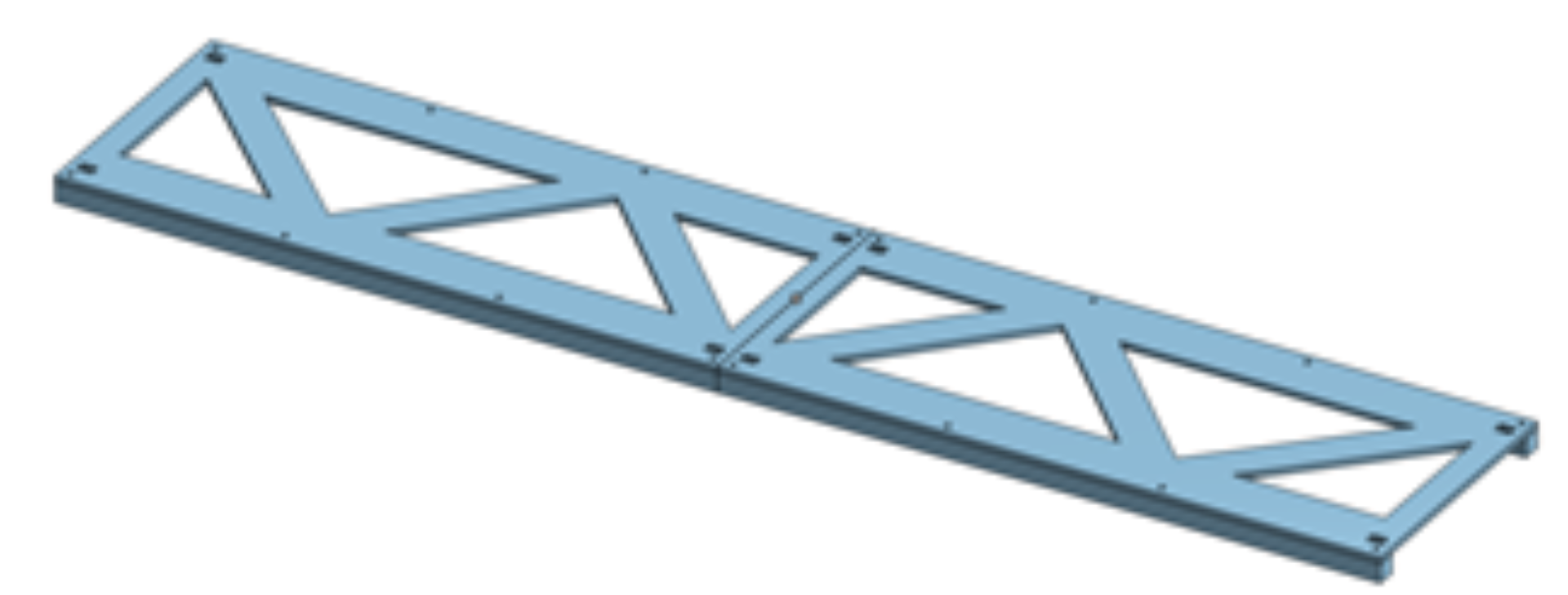
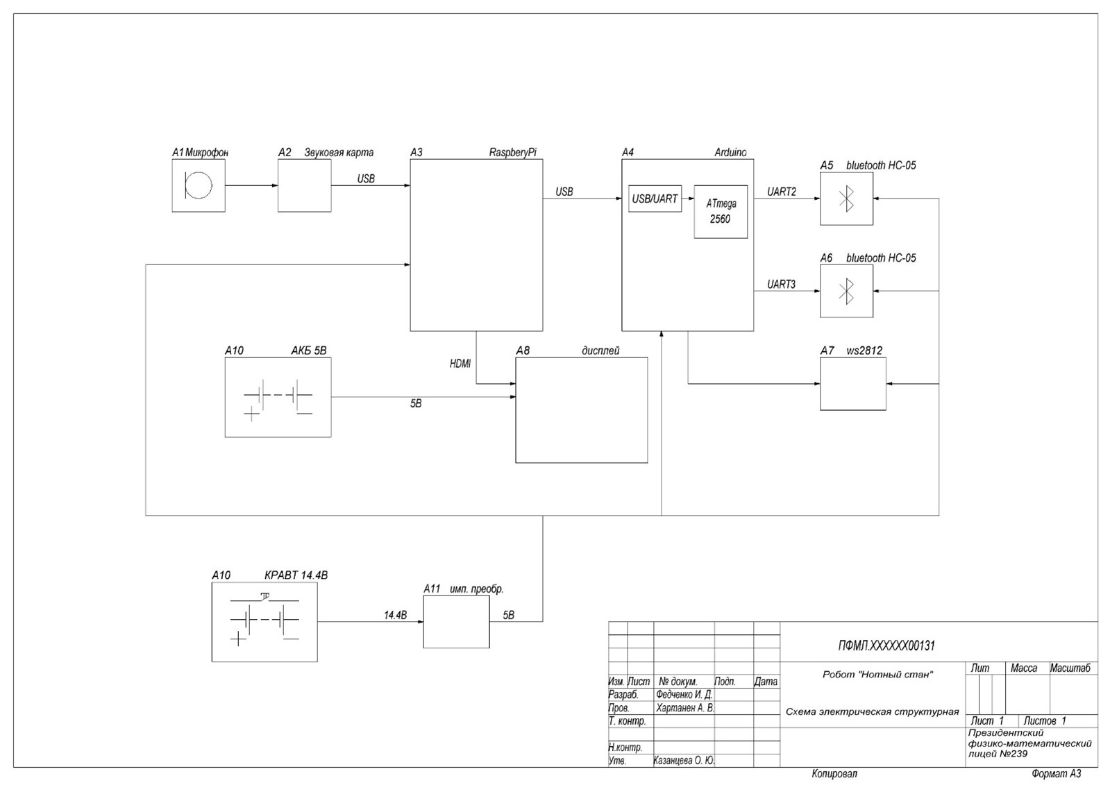
Робот Нотный стан распознает и визуализирует правильность сыгранных нот. В основе конструкции – фанерный ажурный каркас, смоделированный в программе Autodesk Inventor и вырезанный на лазерном станке. Через микрофон нотный стан получает звук, обработка которого происходит в микрокомпьютере Raspberry pi 4. Информация о правильности нот следует по протоколу UART на плату Seeeduino Mega 2560, управляющую отправкой сообщений по Bluetooth на других роботов и светодиоды ws2812b адресной LED-ленты.