


ОБОСНОВАНИЕ

Мировой океан - это взаимосвязанная система океанических вод Земли, покрывающая почти 72% поверхности Земли. Имеющаяся информация об уровне загрязнения мирового океана требует участия всего мирового сообщества в процессе очистки
Большое тихоокеанское мусорное пятно
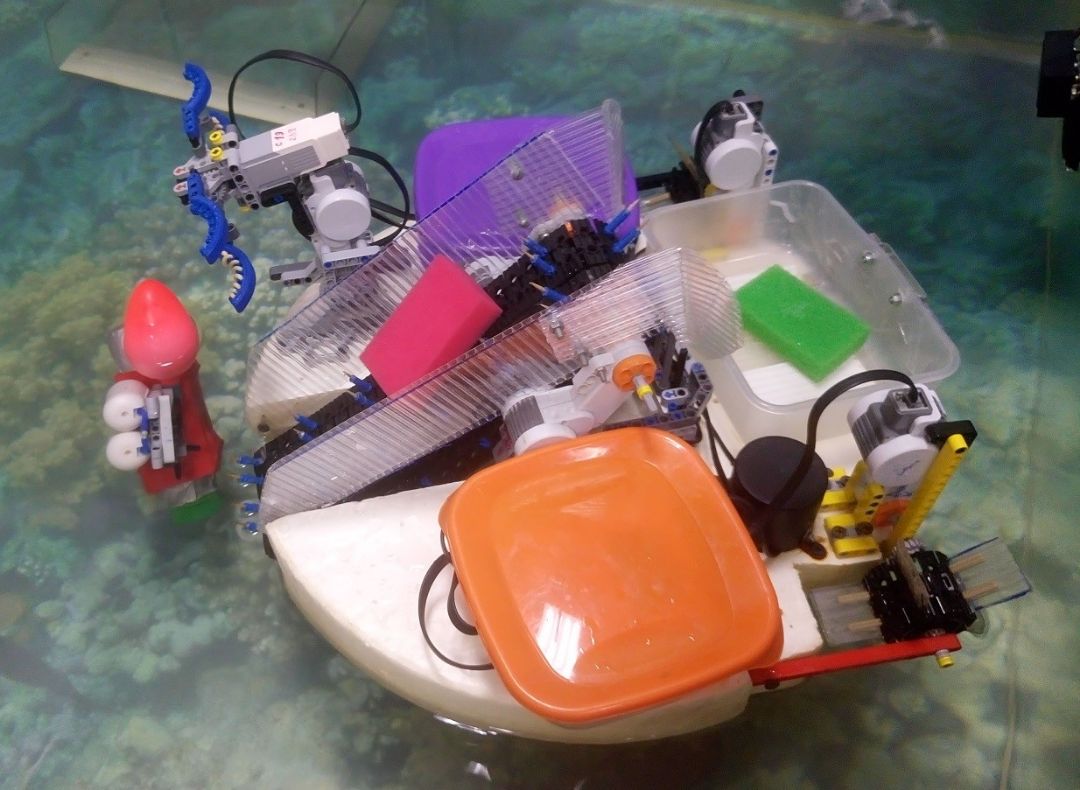
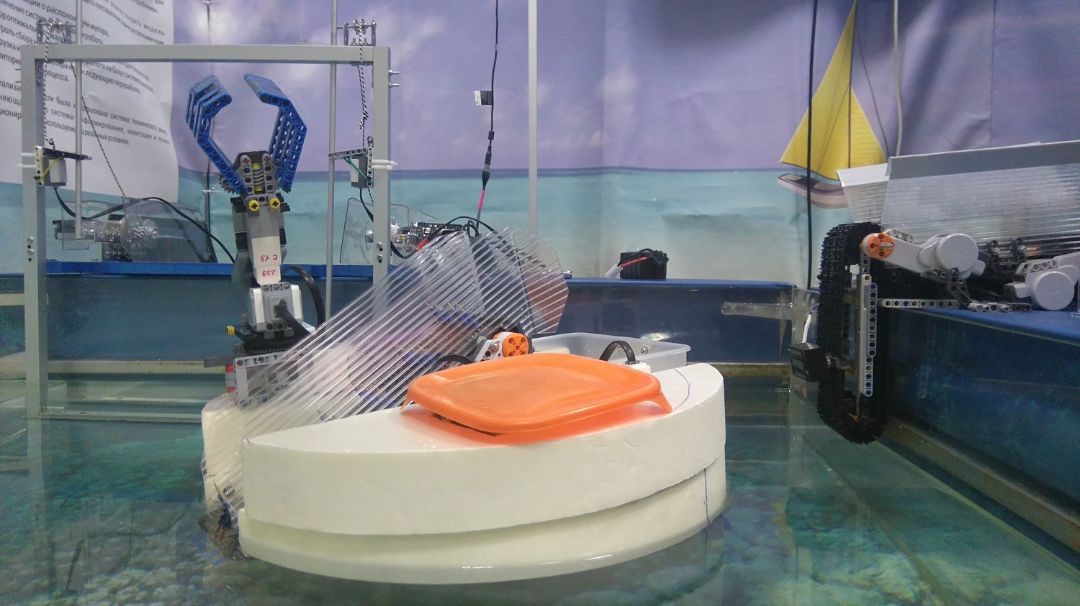
Представляется важным и целесообразным создать роботов, которые можно было бы использовать для автоматического сбора океанских отходов.
Наш творческий проект направлен на решение этой задачи. Мы показываем сбор океанских отходов на поверхности и подъем опасных предметов со дна.



